Octobot – Daily Geek Show
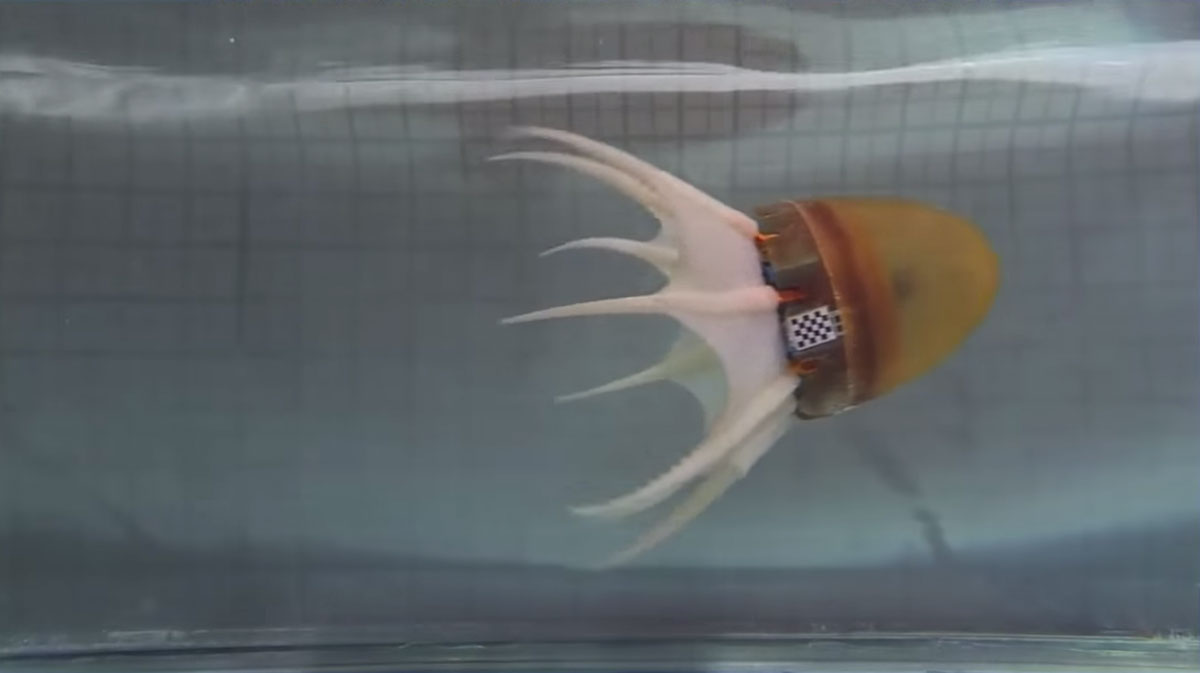
Une équipe de chercheurs de l’Université d’Harvard fabrique le premier robot mou autonome. Activé par des réactions chimiques contrôlées par des microfluides, “l’Octobot” est imprimé en 3D et n’a pas de composants électronique. Lorsqu’on pense à des robots, on imagine plutôt des structures métalliques comme Bender dans Futurama, R2D2 dans Star Wars ou plus moderne et futuriste Wall-e. L’aspect dur et froid des machines auxquelles on aime bien attribuer des émotions humaines vont bientôt devenir obsolètes. C’est le petit robot Octobot, semblable à une petite pieuvre, qui va venir prendre la place des humanoïdes sous les feux des projecteurs.
Conçu par des chercheurs de l’Université d’Harvard et de la Wyss Core Faculty, l’Octobot est présenté dans un publication diffusée par le journal Nature. “Une idée de longue-date pour le domaine de la robotique molle a été de créer des robots entièrement mous, mais la difficulté a toujours été de remplacer les composants rigides comme les batteries et les commandes électroniques avec des systèmes analogues souples puis tout assembler.” a déclaré Robert Wood, doctorant et co-dirigeant de la recherche, dans un communiqué de presse. “Cette recherche démontre que nous pouvons facilement fabriquer les éléments clés d’un simple robot, entièrement souple, qui donne les bases pour des conceptions plus complexes”.
L’Octobot tire son nom d’un mélange entre “Octopus” (faisant référence aux pieuvres) et “robot”. En effet, les pieuvres ont longtemps était une source d’inspiration dans la robotique molle. Ces curieuses créatures peuvent réaliser des prouesses de force et de dextérité sans squelette interne. “Grâce à notre approche d’assemblage hybride, nous avons pu imprimer en 3D chacun des composants fonctionnels nécessaires pour le corps du robot mou, y compris le stockage de l’énergie, la puissance et l’actionnement de manière rapide” à déclaré Jennifer Lewis, doctorante et aussi co-dirigeante de la recherche.
“L’Octobot a un mode de réalisation simple, conçu pour démontrer notre conception intégrée et notre stratégie de fabrication cumulée pour inclure la fonctionnalité autonome”. explique-t-elle. 8 minutes d’autonomie et sans se déplacer L’Octobot est à base pneumatique, c’est-à-dire qu’il est alimenté par un gaz sous pression. Une réaction à l’intérieur du robot transforme une petite quantité de carburant liquide (du peroxyde d’hydrogène avec des colorations différentes pour observer la circulation du fluide) en une grande quantité de gaz qui se propage dans les bras de l’Octobot, les gonfle comme un ballon et donc les fait bouger. Au niveau de la tête du robot, un système de valves souples pincent et relâchent les circuits permettant d’envoyer alternativement le carburant dans les pattes.
“La chose merveilleuse à propos du pérodxyde d’hydrogène est qu’une simple réaction entre le produit chimique et un catalyseur, dans ce cas, la platine, nous permet de remplacer les sources d’énergie rigides” déclare Michael Wehner, chercheur postdoctoral à l’Institut Wyss et dans le Wood lab, co-auteur du papier. Le gaz est ensuite évacué par de petites tuyères. L’Octobot peut donc se déplacer dans de petits espaces tant qu’il lui reste du carburant. Pour l’instant, son autonomie ne dépasse pas les 8 minutes. Il ne peut pas encore se déplacer, ni changer de direction, ni s’adapter au monde qui l’entoure.
Une utilisation limitée, pour l’instant “L’ensemble du système est simple à fabriquer, en combinant trois méthodes de fabrication – la lithographie douce, le moulage et l’impression 3D – nous pouvons rapidement produire ces appareils” a déclaré Ryan Truby, un étudiant de troisième cycle à l’Institut Wyss et dans le laboratoire de Lewis et co-auteur de la publication. La simplicité du processus d’assemblage ouvre la voie pour des designs plus complexes. Ensuite, l’équipe d’Harvard espère concevoir un Octobot capable de ramper, nager et interagir avec son environnement. “Cette recherche est une démonstration de conception” dit Truby,
“Nous espérons que notre approche pour créer des robots mous autonomes inspire les roboticiens, les scientifiques des matériaux et les chercheurs concentrés sur la fabrication de pointe”. La publication a été co-écrite par Daniel Fitzgerald de l’Institut Wyss et Bobak Mosadegh, de l’Université Cornell. La recherche a été soutenue par l’Institut Wyss et la National Science Foundation à travers la science Materials Research and Engineering Center à Harvard. Publié par Marie Souque, le 02 septembre 2016
En savoir plus : http://www.maxisciences.com/robot/le-premier-robot-entierement-mou-est-une-petite-pieuvre_art38648.html
Copyright © Gentside Découverte
You must be logged in to post a comment Login
LAISSER UN COMMENTAIRE
Vous devez vous connecter pour publier un commentaire.